ACE#S & The "M SPACE" Model: How It Works
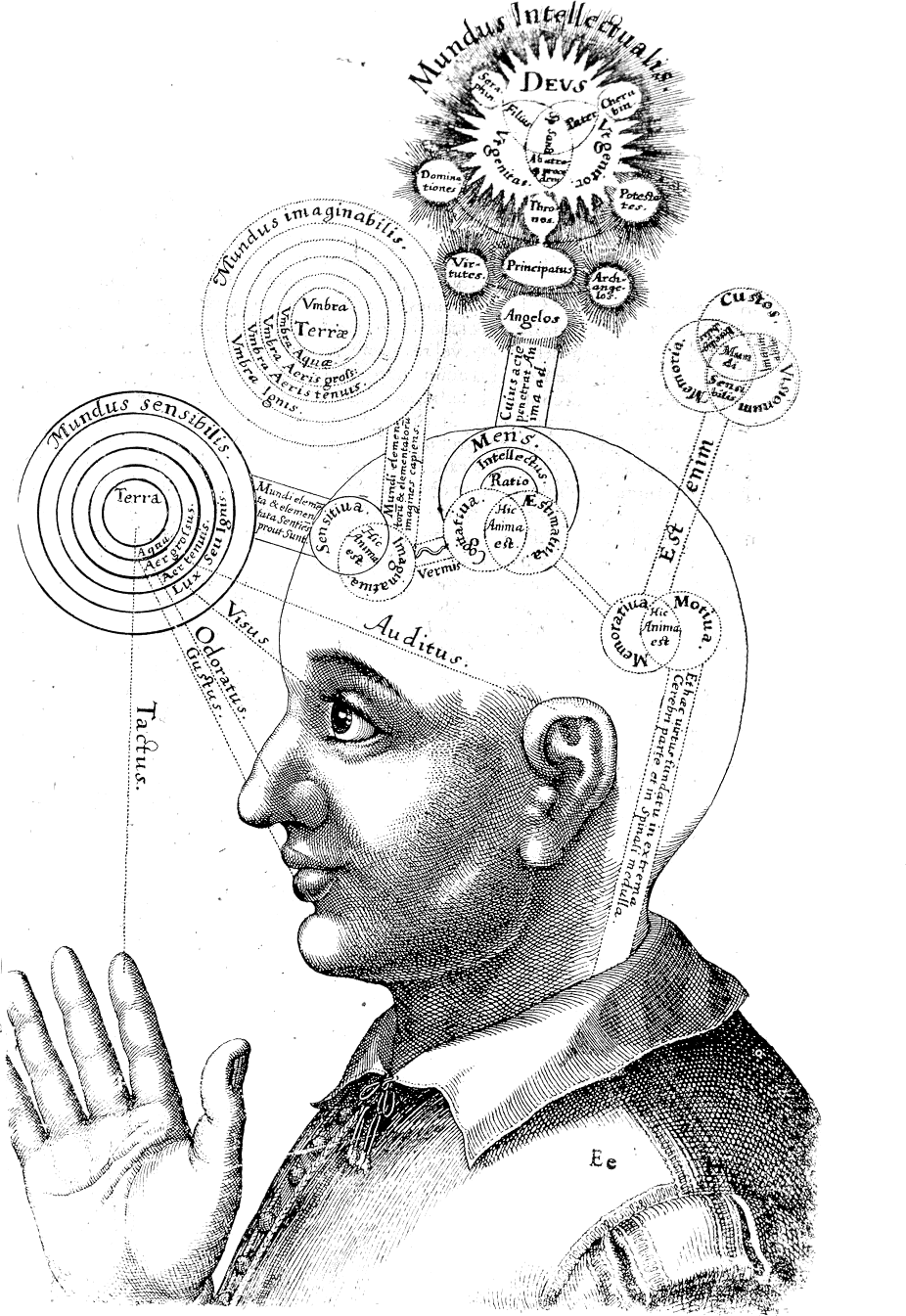
Emulating Cognition and Humans' Use of Mental ModelsThe Autonomous Cognition Engine for 'n' Senses (ACE#S) is our primary product line, in the form of a family of specialized modules that can be embedded in various types of other systems, or used as the core for DIY intelligent systems, including robotic systems. ACE#S is an emulation of our team's current best understanding of the human cognitive architecture. We intend and expect ACE#S to both adapt, learn, and evolve as our team and external partners apply ACE#S to a variety of future systems/devices/vehicles. This family of ACE#S modules can each be thought of as sort of an adaptable, customizable, Central Nervous System (CNS, or brain and spinal cord) for each system/device/vehicle in which it is embedded. We intend to sell both this family of modules and several varieties of systems/devices/vehicles which we and an array of ecosystem partners can build around ACE#S. We also intend to support a broad community of DIY robot builders wishing to bring significant competent taskable autonomy to their own creations by including our ACE#S module. ACE#S begins with emulating humans' use of mental models in the many diverse situations encountered in each role performed. As illustrated in the second image, below (line drawing from 1619 annotated in Latin), thinking about thinking has been going on pretty much since we humans became homo sapiens (or as our founder tends to put it, Mark I mod 1 human). ACE#S is our current best design for an architecture capable of emulating cognition at a new higher level of fidelity than prior approaches to AI and executable cognitive architectures.
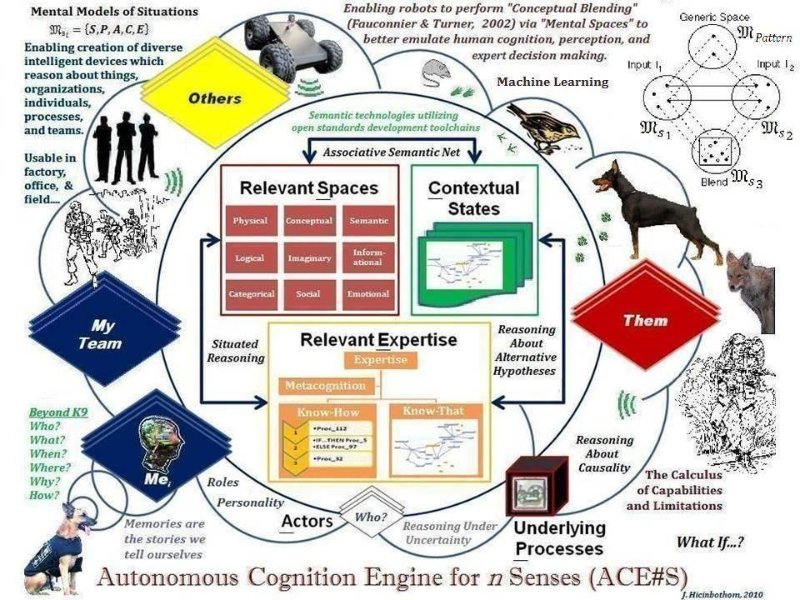
ACE#S Mental Models of Situations are composed of the set of:
S : The Set of Relevant Spaces
P : The Set of Relevant Underlying Processes A : The Set of Relevant Actors C : The Set of Relevant Contextual States E : The Set of Relevant Expertise
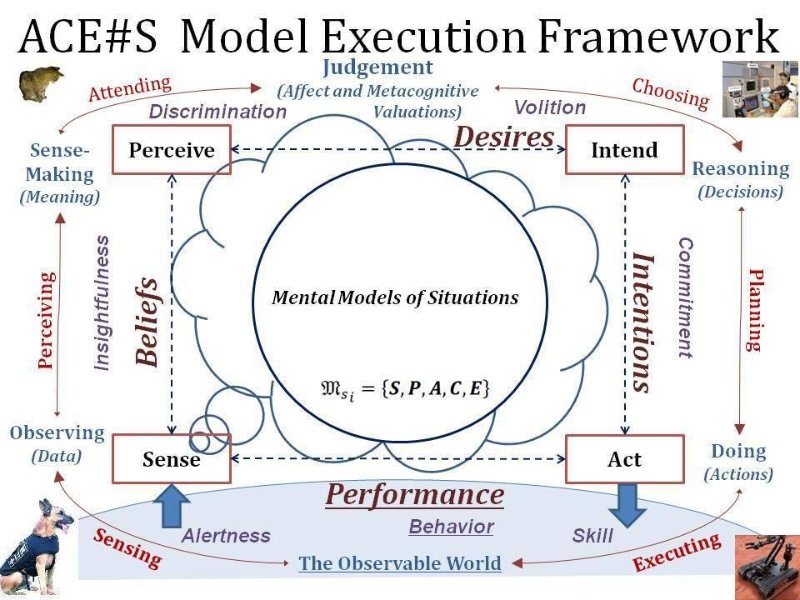
These mental models of situations form a key part of the basis for emulating human cognition. To put those models to work, we run them in the ACE#S Model Execution Framework.
Note that this model execution framework may be connected to the real world through the body in which ACE#S is embedded, or it may be connected to a simulated world via either its real body (assuming means of both accurately stimulating its real sensors and accurately engaging its real actuators in that observable simulated world) or a simulated body within that simulated world. In either event, the sensors and actuators available to ACE#S in that body essentially determine what subset of that world is observable to ACE#S. A robot in a field (real or simulated) with no sensors is pretty limited in its effective 'Observable World' and is unlikely to be very useful. That's about all we can say at this time about ACE#S and its applications. The rest of the actual details and formal definitions are both Proprietary and Export Controlled. ** Image from 1619 illustrating (in Latin) early conceptions of the human mind is available courtesy of: https://commons.wikimedia.org/wiki/File:RobertFuddBewusstsein17Jh.png Robert Fludd, Utriusque cosmi maioris scilicet et minoris […] historia, tomus II (1619), tractatus I, sectio I, liber X, De triplici animae in corpore visione. |
 **
**
{kind=link}